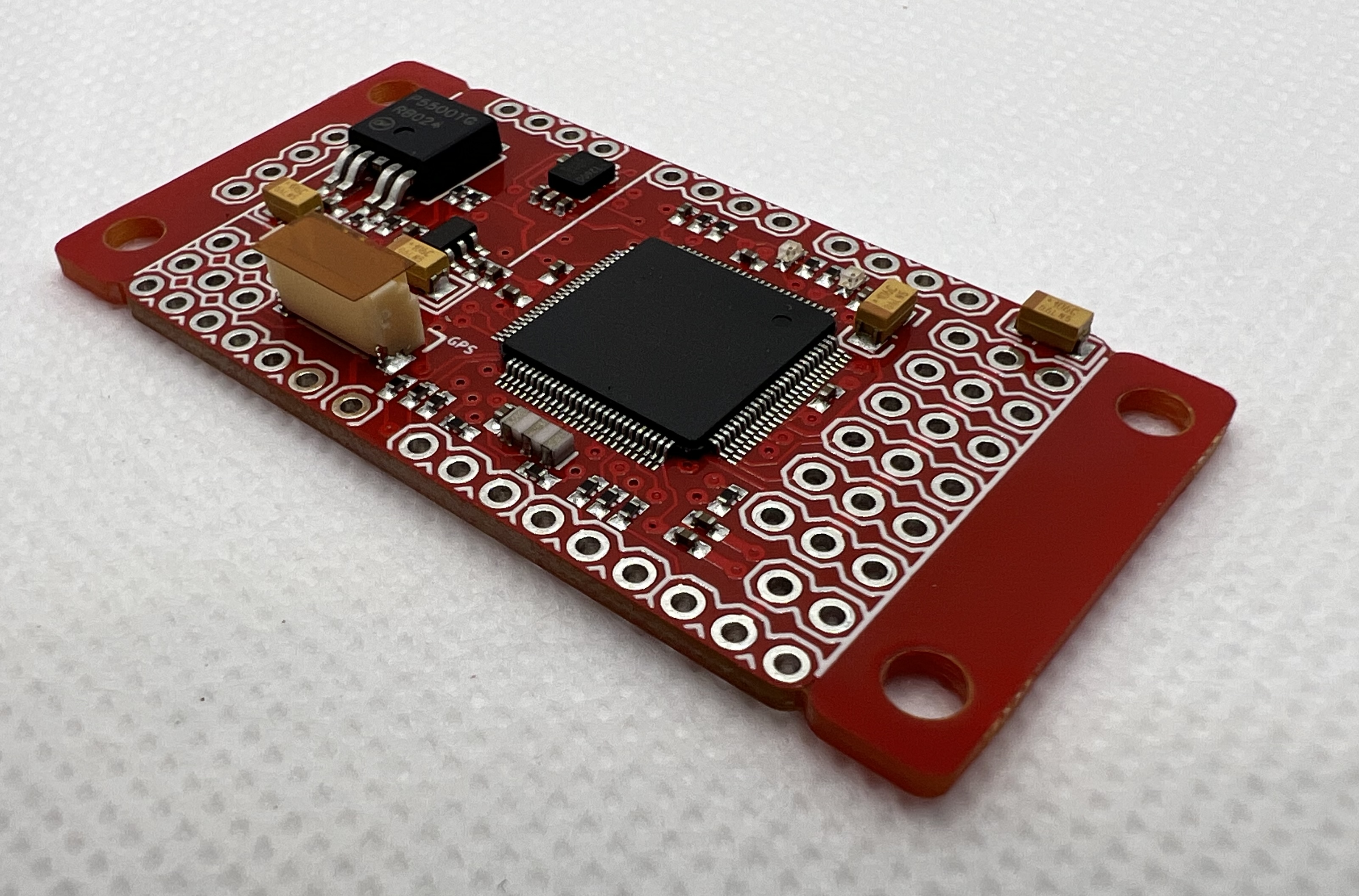
The UDB7mini (UAV Development Board version 7, miniature version) is based on the UAVDevBoard5, originally co-designed by Bill Premerlani and SparkFun. The UDB7mini has been further miniaturized, and updated with more accurate sensors. It comes populated with a dsPIC33FJ256A CPU, and ICM-20600 (3-axis gyroscope and 3-axis accelerometer).
By itself, the board can be used to develop a three axis IMU controller. By addition of an EM506 or uBlox M8Q GPS receiver, it can be used to develop a UAV controller for an RC car, plane, helicopter, multirotor, boat, or your own Frankensteined robot monster.
The open source MatrixPilot project provides fully functional autopilot firmware, or its libraries can be used as a starting point for you to develop your own control and navigation firmware (example projects are included).
This family of boards has been used in thousands of RC planes, cars, rockets, and robots.
MatrixPilot Repository →

Download Schematics and Layout (KiCad) →